Die aktuelle Art und Weise, den Korrosionszustand von Stahlbetontragstrukturen mittels zerstörungsfreier Prüfmethoden zu beurteilen, ist in Bezug auf Effizienz und Genauigkeit/Aussagekraft limitiert. Die Effizienz ist reduziert durch den hohen Personaleinsatz sowie zusätzliche Gerätschaften (z.B. Hebebühnen), um nicht einfach zugängliche Flächen zu inspizieren. Die begrenzte Genauigkeit/Aussagekraft ist einerseits eine direkte Folge des Zeitaufwands händischer Messungen und damit einer oft nur punktuellen und auf einige wenige Methoden beschränkte Inspektion, andererseits durch die limitierte Reproduzierbarkeit und örtliche Referenzierung am Objekt von händischen Messungen begrenzt, welche zu einem Mehraufwand führt.
Mit der Alterung unserer Infrastruktur, wie beispielsweise dem Nationalstrassennetz errichtet während des Baubooms zwischen 1960 und 1980, erwarten wir einen rapiden Anstieg von Bauwerksinspektionen in den nächsten Jahrzehnten. Diese Bauwerke haben im Mittel bereits ein Alter von rund 50 Jahren und benötigen daher erhöhte Aufmerksamkeit durch regelmässige visuelle Inspektionen, aber auch Inspektionen mit zerstörungsfreien Prüfmethoden. Diese Inspektionen dienen als Entscheidungsgrundlage für die Instandhaltungs- und Instandsetzungsplanung der Ingenieure. Dabei ist die Korrosion der Bewehrung ist die Hauptursache für Schäden und verursacht an Ingenieurbauwerken im Schweizer Strassennetz Kosten von rund 1000 Franken pro Minute. Demzufolge erwarten wir einen erhöhten finanziellen Bedarf um die Bauwerke nahe am Ende der Lebensdauer unter Berücksichtigung von Sicherheitsaspekten zu unterhalten.
Aus diesen Gründen sehen wir ein grosses Potential, die regelmässigen visuellen Bauwerksinspektionen mit autonomen Flugrobotern und zerstörungsfreien Prüfmethoden zu ergänzen. Die chlorid-induzierte Korrosion kann i.d.R. nicht visuell detektiert werden, daher ist das Ziel des Projektes die bewährte Potentialfeldmessung, sowie andere zerstörungsfreie Prüfverfahren, mit Flugrobotern zu kombinieren. Die Erkennung des Schadens bevor sich grössere Schäden manifestieren, erlaubt gezielten Unterhalt und Instandsetzung.
Die Potentialfeldmessung, wie auch andere zerstörungsfreie Prüfverfahren (Betonüberdeckungsmessung, Betonwiderstandsmessung), benötigt physischen Kontakt zur Betonoberfläche. Herkömmliche, kommerzielle Drohnen sind nicht in der Lage kontrollierten Kontakt mit der Betonoberfläche herzustellen und daher nicht für die kontakt-basierte Inspektion von Bauwerken geeignet. Der Einsatz von Flugrobotern, im Vergleich zu Robotern mit Rädern, Raupen oder dgl., erlaubt zudem schwer zugängliche Stellen ohne weitere Hilfsmittel wie Lastwagen mit Hebenbühnen oder Leitern zu erreichen. Der Einsatz eines autonomen Flugroboters würde das Level der Automation der Datenaufnahme erhöhe, dies führt schlussendlich zu einer erhöhten Effizienz und einer Reduktion des Personaleinsatzes.
Um mit der Erhöhung der Automation bei der Datenaufnahme Schritt zu halten, muss gleichermassen ebenfalls die Datenauswertung optimiert werden. Die Datenauswertung soll dabei ebenfalls Vorteile bei der Zuverlässigkeit und Genauigkeit der örtlichen Vorhersage von Schäden als auch beim Auffinden kleinerer Korrosionsstellen Vorteile aufweisen. Diese Verbesserungen sollen erreicht werden durch ein automatisiertes Verfahren zur Auswertung der Bilder in Kombination mit der Potentialfeldmessung sowie elektrischen Betonwiderstandsmessungen während des Kontaktes des Sensors mit der Betonoberfläche. Die teilautomatisierte Datenauswertung führt schlussendlich zu einer besseren Objektivität (im Vergleich zur oft sehr subjektiven Interpretation der Ergebnisse durch Fachpersonen unterschiedlicher Erfahrung und Qualifikationen) bei Zustandsbeurteilung von Ingenieurbauwerken in der Zukunft. Diese Herausforderungen wurden mit einem interdisziplinären Forschungsansatz bearbeitet durch das Autonomous Systems Lab und das Institut für Baustoffe der ETH Zürich.
Vorgehen
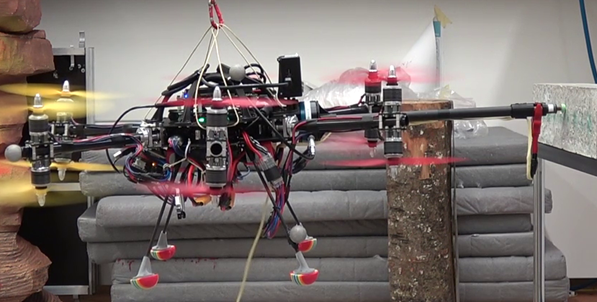
- Ein omnidirektionales Mikroluftfahrzeug (OMAV) wurde entwickelt für die kontakt-basierte Inspektion und ist mit einem elektrochemischen Sensor ausgerüstet.
- Autonome Flüge zu vordefinierten Koordinaten
- Verbesserung der Datenanylse durch KI und Datenfusion