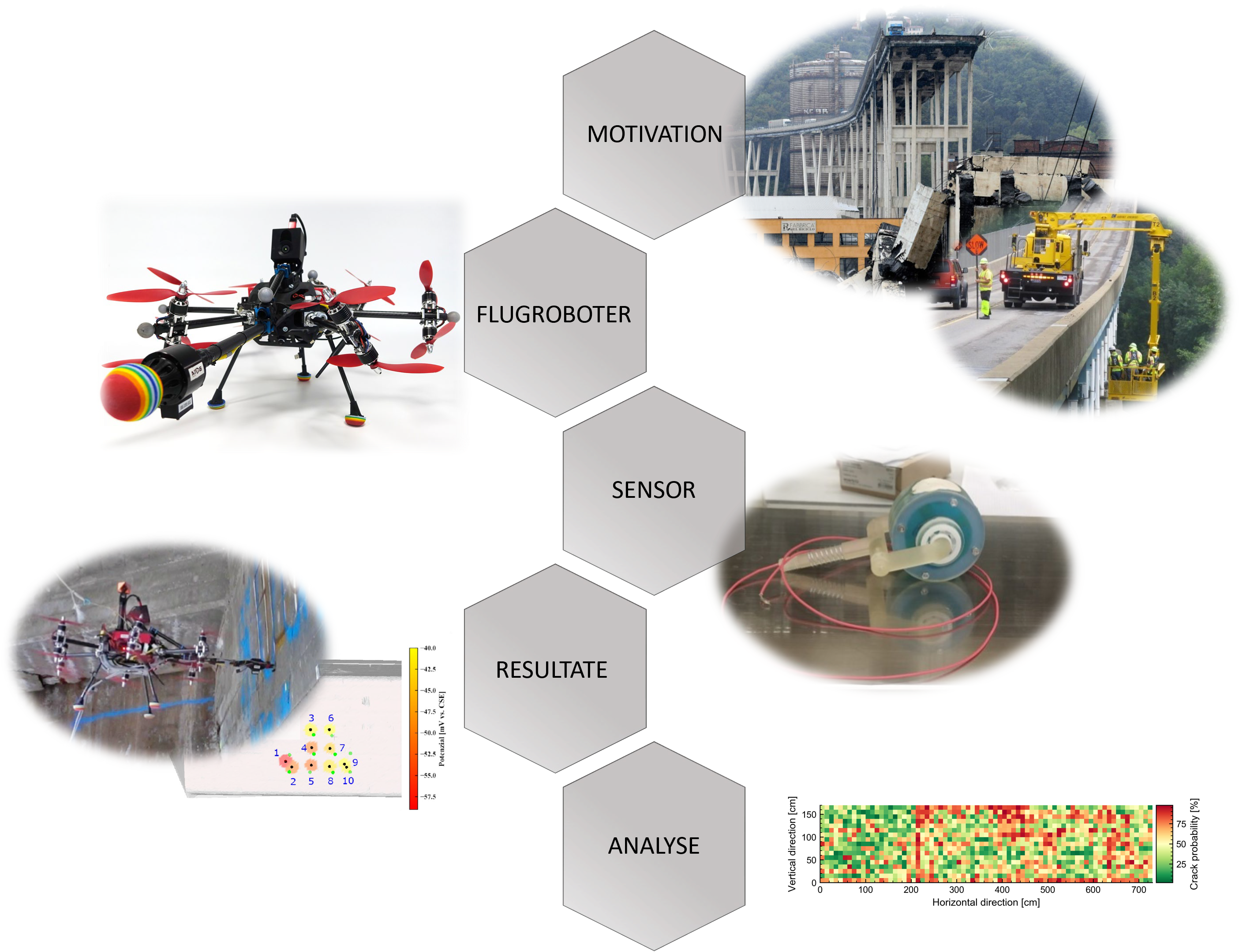
Die Instandhaltung- und Instandsetzung von Infrastrukturbauten aus Stahlbeton wird die Gesellschaft vor Herausforderungen stellen. Wir schlagen für eine effiziente Inspektion dieser Bauwerke einen autonomen, omnidirektionalen Flugroboter mit zerstörungsfreien, kontakt-basierten Prüfmethoden vor.
Mit dem Prototyp des fliegenden Roboters wurde an Ingenieurbauwerken Daten gesammelt und analysiert und zugleich die Umsetzbarkeit dieses Vorhabens demonstiert.
Ausgewählte Publikationen
[1] K. Bodie , M. Brunner, M. Pantic, S. Walser, P. Pfändler, U. Angst, R. Siegwart & J. Nieto, “An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection,” in Robotics: Science and Systems XV, 2019.
[2] P. Pfändler, K. Bodie, U. Angst, and R. Siegwart, “Flying corrosion inspection robot for corrosion monitoring of civil structures – First results,” in SMAR 2019 – Fifth Conf. Smart Monit. Assess. Rehabil. Civ. Struct. – Progr., p. We.4.A.6, 2019.
[3] K. Bodie, Z. Taylor, M. Kamel, and R. Siegwart, “Towards Efficient Full Pose Omnidirectionality with Overactuated MAVs,” in Proceedings of the 2018 International Symposium on Experimental Robotics, 2018, pp. 85–95.
[4] K. Bodie , M. Brunner, M. Pantic, S. Walser, P. Pfändler, U. Angst, R. Siegwart & J. Nieto, “Active Interaction Force Control for Contact-Based Inspection With a Fully Actuated Aerial Vehicle,” in IEEE Transactions on Robotics, 2020