Neuartiger Flugoboter
Kommerzielle erwerbliche Drohnen können nicht mit einer Referenzelektrode ausgestattet für die Durchführung der Potentialfeldmessung ausgerüstet werden. Einerseits können diese Drohnen keinen kontrollierten physischen Kontakt mit der Betonoberfläche herstellen, andererseits ist die Flugdauer dieser Systeme durch die Batterie eingeschränkt und würde unter Erhöhung des Gewichtes nochmals reduziert werden. Für die Planung der Flüge dieser Drohnen ist häufig ein GPS-Signal zwingend notwendig, dies würde zu Einschränkungen der Möglichkeiten zur Inspektion der beiden Bauwerkstypen Brücken und Tunnels führen. Bei den Untersichten von breiten Brücken kann kein zuverlässiges GPS-Signal erwartet werden und in Tunnels ist gar kein GPS-Signal vorhanden. Die Summe dieser Punkte verhindert die einfache Umrüstung von Drohnen für die kontakt-basierte Inspektion von Stahlbetontragwerken.
Die Vorteile des OMAV gegenüber einer herkömmlichen Drohne ist die gesteigerte Anzahl der Freiheitsgrade von 4 auf 6 als auch die Möglichkeit der Übersteuerung durch die individuelle Neigung der einzelnen Rotorgruppen. Diese Vorteile erlauben es dem Roboter seine Orientierung zu ändern, ohne dabei seine Position in der Luft zu verändern und dient als Grundlage für die kontrollierte physische Interaktion mit Bauwerken. Des Weiteren ermöglicht die Neigung der Plattform, somit auch des Sensors am Ende eines Armes seine Orientierung zu verändern, um zerstörungsfreie Prüfverfahren auf unterschiedlich geneigten Flächen während desselben Fluges zu positionieren.
Die Vorteile der Entwicklung des fliegenden omnidirektionalen Roboters wurden diese Punkte aufgenommen und technisch gelöst.
Um Kontaktkräfte für die Inspektion auf einer Oberfläche in beliebiger Ausrichtung zu erzeugen, mussten wir einen neuen Typ eines omnidirektionalen Flugroboters entwickeln. Dieser Roboter muss in der Lage sein, Kraftvektoren zu kontrollieren und in alle Richtungen zu fliegen.
Kraftvektorsteuerung
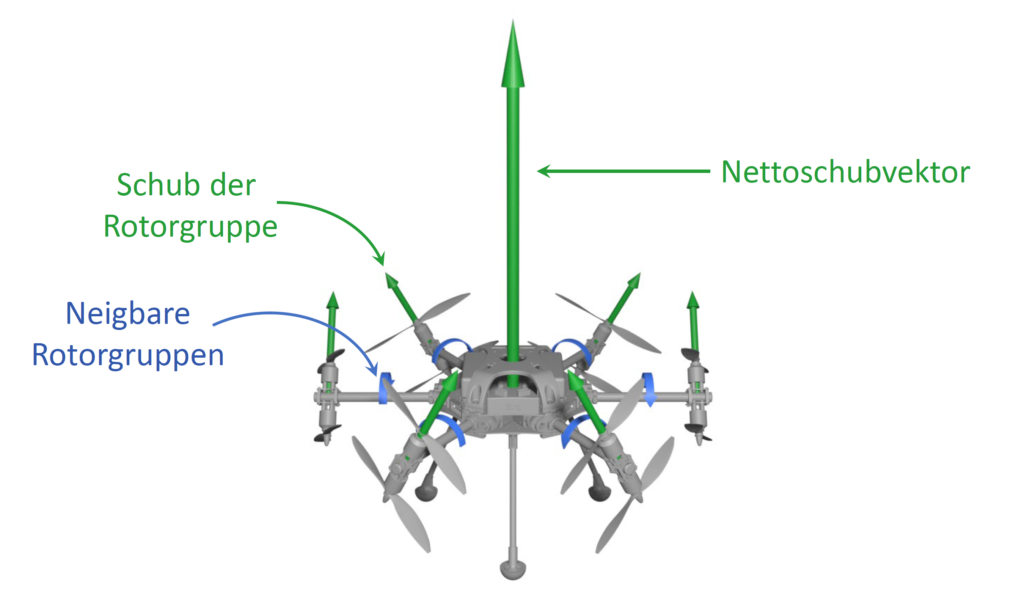
Neigbare Rotoren erlauben die Entkoppelung der Translations und Rotationsdynamik des fliegenden Roboters. Das Beispiel unten zeigt diese Entkoppelung am Beispiel des Flugroboters mit und ohne neigbare Rotorgruppen.
Rechts: Neigende Rotoren ermöglichen eine Schubvektorsteuerung, ohne den Körper zu rotieren, somit sind Translations- und Rotationsdynamik entkoppelt.
Omnidirektionaler Flug
Zusätzlich kann der Flugroboter durch die Rotation der Rotorgruppen seine Orientierung verändern und die Position zu halten. Eine gewöhnliche Drohne wäre nicht in der Lage die Orientierung unter Beibehaltung der Position.
Manipulator
Für einen effizienten Flug kann die Orientierung des Sensors relative zur Plattform adaptiert werden. Die Abbildungen zeigen den Flugroboter mit den zwei unterschiedlichen Sensoren in ungleicher Orientierung zur Plattform sowie die bevorzugte Kontaktrichtung mit der Oberfläche. Die Länge des Manipulators muss so gewählt werden, dass der Sensor ausserhalb der Rotorgruppen liegt.
Technische Daten
Die Abbildung zeigt den Prototyp des Flugroboters mit geneigten Rotorgruppen und einem Dummysensor am Ende des Manipulators. Die Tabelle gibt einen Überblick über die technischen Daten des Flugroboters.

| Parameter | Einheit | Wert |
|---|---|---|
| Totales Gewicht | kg | 4.75 |
| Durchmesser des Flugroboters | m | 0.83 |
| Anzahl Rotorgruppen | - | 6 |
| Anzahl der Rotoren pro Gruppe | - | 2 |
| Neigung des Arms gegenüber der Plattform | ° | 0 resp. 45 |
Lokalisation
Laborflüge
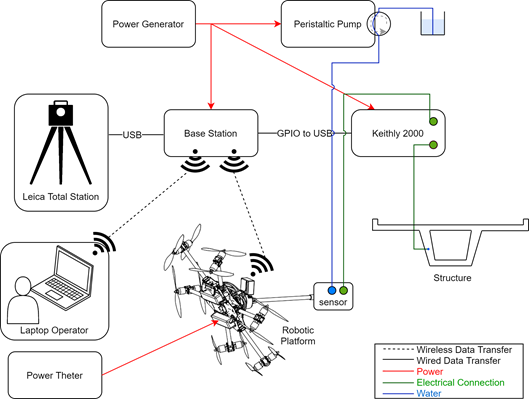
Die Lokalisation im Raum und die Bestimmung der aktuellen Orientierung erfolgte im Labor mit Hilfe eines motion caputure system (externes Kamera-Bewegungsverfolgungssystems) von Vicon. Das System besteht aus mehreren fix installierten Kamera, welche graue Marker am Flugroboter erkennen (wie z.B. an am vorderen rechten Fuss in Abbildung oben) mit einer Rate von bis zu 250 Hz. Für Aussenflüge resp. Flüge ausserhalb muss auf eine Leica Totalstation mit Reflektor auf dem Flugroboter zurückgegriffen werden, welche eine Abdriften des Systems verhindern soll. Weitere Daten zur aktuellen Position und Orientierung liefert eine inertiale Messeinheit (IMU). GPS-Signale können nicht verwendet werden, da die Signalqualität an Brückenuntersichten nicht ausreichend ist und in Tunnelbauwerken gar nicht vorhanden sind. Dies ermöglicht das Anfliegen von Zielpunkten und Erfassen von Daten von zerstörungsfreien Messverfahren autonom und automatisiert ausserhalb des Labors.
Aussenflüge
Für Aussenflüge resp. Flüge ausserhalb muss auf eine Leica Totalstation mit Reflektor auf dem Flugroboter zurückgegriffen werden, welche eine Abdriften des Systems verhindern soll. Weitere Daten zur aktuellen Position und Orientierung liefert eine inertiale Messeinheit (IMU). GPS-Signale können nicht verwendet werden, da die Signalqualität an Brückenuntersichten nicht ausreichend ist und in Tunnelbauwerken gar nicht vorhanden sind. Dies ermöglicht das Anfliegen von Zielpunkten und Erfassen von Daten von zerstörungsfreien Messverfahren autonom und automatisiert ausserhalb des Labors.
Energieversorgung
Die Energie kam zu Beginn des Projektes aus zwei leistungsfähigen Lithium-Polymer-Akkumulatoren. Dies ermöglichte Flüge von rund 6 Minuten bevor die Akkus auswechselt werden müssen. Daher wurde im Verlauf des Projektes ein Transformator für die kontinuierliche Versorgung mit Energie für längere Inspektionsflüge angeschafft.