Hier werden die Resultate ausgewählter Experimente kurz beschrieben.
Erste Laborflüge
Erste Flüge mit dem Korrosionsinspektionsroboter im Labor haben gezeigt, dass vom Roboter nahezu konstante Kräfte auf einen Prüfkörper aufgebracht werden können, zugleich führte dies zu stabilen Potentialwerten über die Zeit. Die Koordinaten der Zielpunkte auf dem Prüfkörper wurden vorgängig bestimmt und durch den Flugroboter autonom angeflogen.
Die Abbildung unten zeigt 9 Potentialverläufe aufgenommen an 9 Punkten entlang des Prüfkörpers in Abständen von 5 cm während dem Kontakt des Sensors mit dem Prüfkörper.
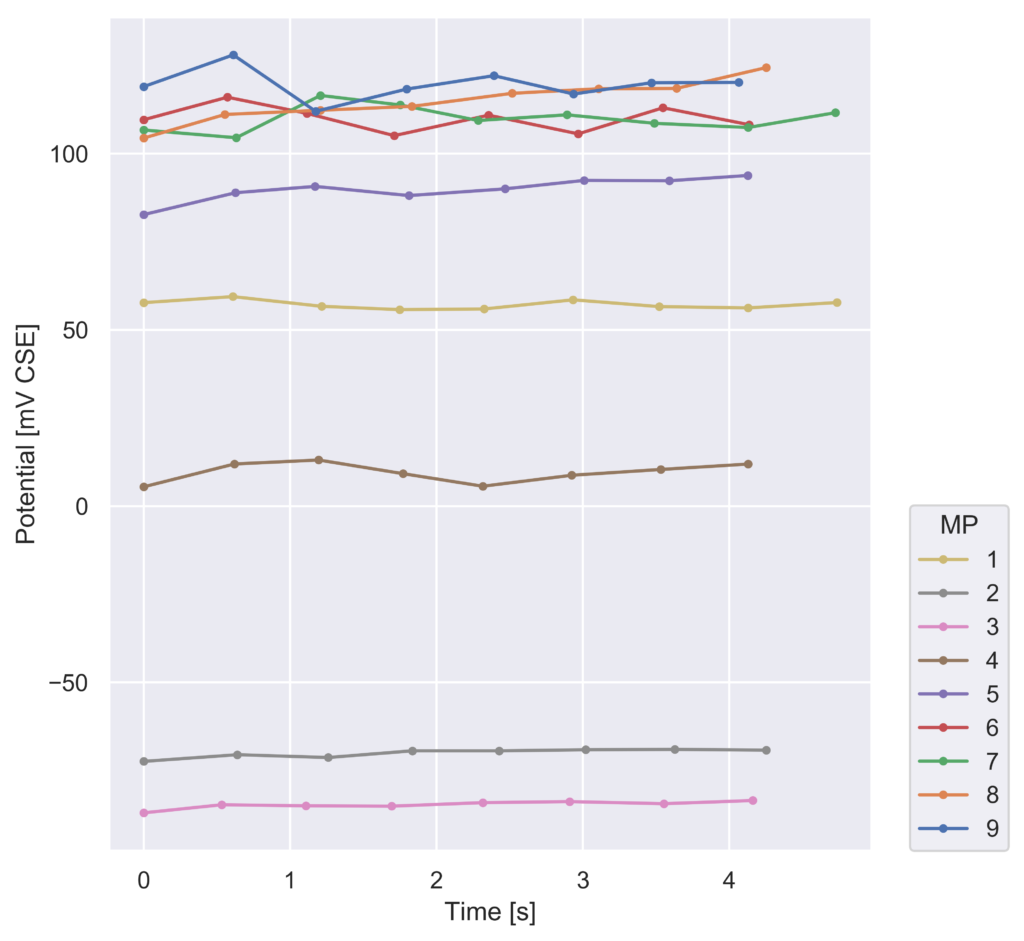
Des Weiteren sind die abgeschätzten Kräfte des Kraftssensors über die Zeit dargestellt. Der Kraft während des Kontaktes ist bei ca. 1.5 N und nahezu konstant während dem Kontakt, als auch reproduzierbar beim nächsten Kontakt des Sensor mit der Oberfläche. Nach dem ersten Kontakt bleibt ein Off-set von ca. 0.4 N auf dem Kraftsensor zurück ohne Auswirkungen auf die nächsten Anpresskraft beim den nächsten Punkten.
Ein weiterer Indikator, nebst den Kraftmessdaten, dass der Sensor stets Kontakt mit der Oberfläche sind die Potentialdaten. Falls der Messkreis für die Bestimmung des Potentials nicht geschlossen ist (d.h. kein Kontakt des Sensors mit dem Beton), dann driftet das Messgerät üblicherweise ab.
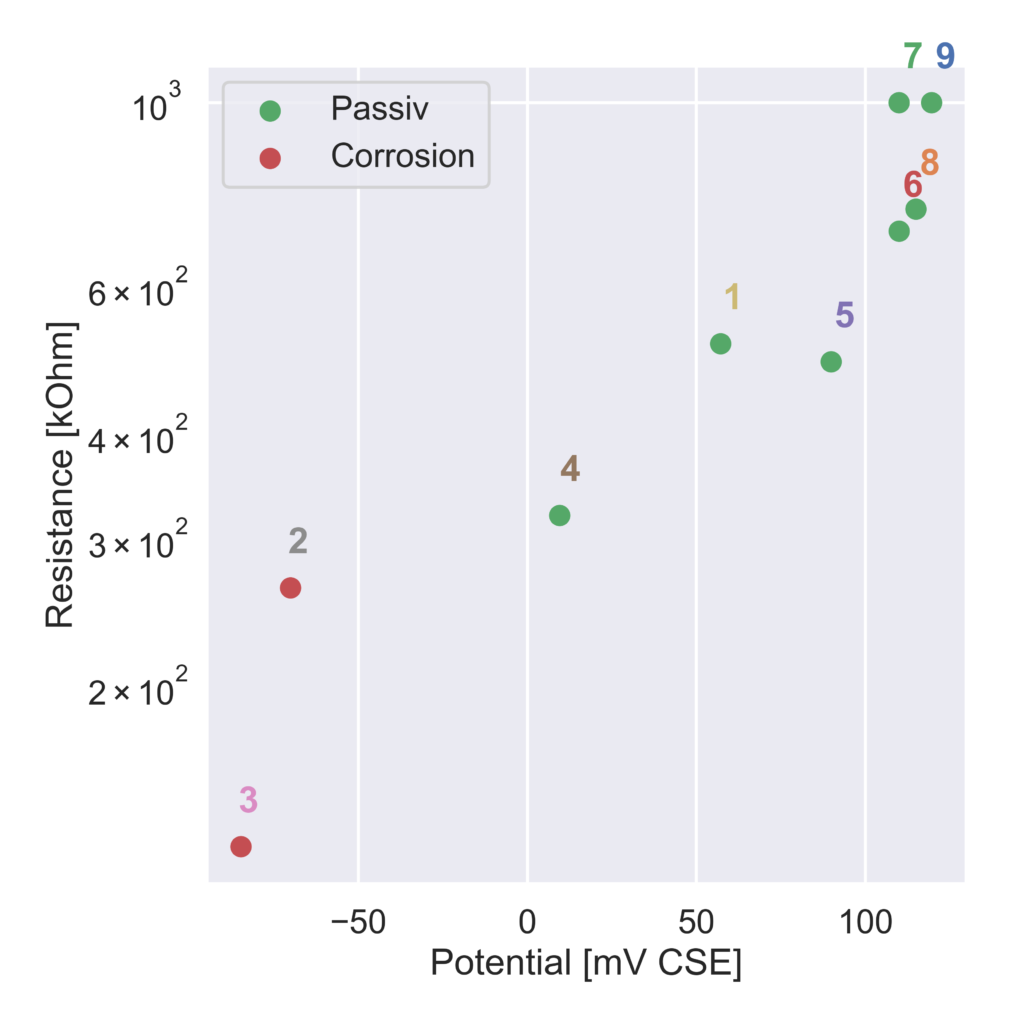
Der Prüfkörper verfügt über eine Korrosionsstelle induziert durch stark chloridhaltigen Mörtel ca. 10 cm entfernt von einem Ende des Prüfkörpers. Diese Korrosionsstelle konnte bei diesem Flug erfolgreich detektiert werden. Eine kombinierte Auswertung der beiden zerstörungsfreien Messdaten (elektrochemisches Potential und elektrischer Widerstand) führt zu einer erhöhten Detektionswahrscheinlichkeit für der Korrosion (vgl. Abbildung unten). Die Korrosionsstelle an diesen Prüfkörper befindet sich zwischen den Punkten 2 und 3 und wurden erfolgreich detektiert aufgrund des tiefen Potentials in Kombination mit einem tiefen elektrischen Widerstand.
Geneigter Prüfkörper
Im Labor wurden weitere Flugversuch unternommen um die vollständige Zusammenführung sämtlicher Messdaten in einem System. Sämtliche Daten des Flugroboters laufen auf dem Robotic Operating System (ROS) zusammen. Bis anhin wurden die Messdaten unabhängigen Systemen gespeichert, was folglich die exakte direkte Überlagerung von Messwerten erschwerte.
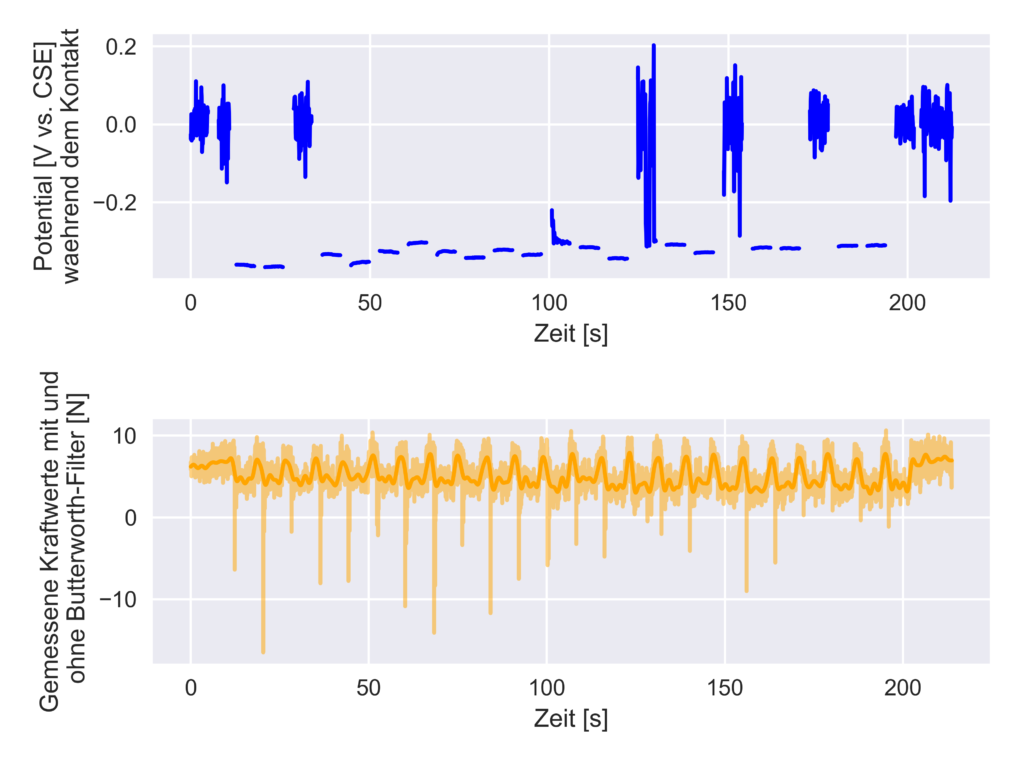
Die Abbildungen zeigen die Positionen des Arms des Roboters während eines Inspektionsfluges in 3D des Videos von oben und die Bewegung des Armes zerlegt in die einzelnen Richtungen (x,y,z) gegenüber der Zeit. Die 24 Zielpunkte befanden sich auf einem Betonprüfkörper und sind aufgeteilt in 3 vertikalen Reihen zu je 8 Punkten. Die Anflugreihenfolge ist von rechts nach links und von unten nach oben und ist in der Grafik unten visualisiert. An jedem Punkt wurden die Potentiale mit einer Frequenz von 10 Hz aufgezeichnet und die Anpresskraft wurde mit einem Kraftsensor abgeschätzt.
Die Potentiale sind dargestellt zu jenen Zeitpunkt, wo der Flugroboter seine Zielposition mit dem Sensor erreicht hatte. An einigen Stellen wurden die Potentiale nicht korrekt erfasst. Der Kontakt mit dem Betonprüfkörper ergibt eine deutliche Änderung bei der ausgezeichneten Kraft. Bei den Kraftmesswerten gibt es zu beachten, dass die Werte von der Orientierung des Sensors abhängen. Die mittlere aufgebrachte Kraft beträgt ca. 1.5 N.
Aussenflüge
Geneigter Anflug an Brückenhohlkasten
Die Abbildung unten zeigt den ersten Kontakt des fliegenden Korrosionsinpsektionsroboters an einem Ingenieurbauwerk. Die Herausforderungen bei diesem Versuch waren die Umstellung des Lokalisierungssystem vom Kameraverfolungssystem zu einer Kombination aus IMU und Totalstation mit Reflektor, Luftströmungen (Winde, Turbulenzen an der Brückenuntersicht) und die Kontrolle des Flugroboters bei geneigter Plattform. Der Arm mit dem elektrochemischen Sensor war gegenüber der Plattform um 45° geneigt. Das Ziel des Fluges war es den Kontakt senkrecht zur Oberfläche mit dem Sensor zu erstellen um einen Wegrutschen zum Vermeiden und für eine ausreichenden Kontakt mit dem Schwamm auf der Betonoberfläche zu sorgen. Die Schritte beim Anfliegen des Punktes waren erstens das Neigen der Plattform auf die Orientierung senkrecht zur Oberfläche durch die Neigung der Doppelrotoren. Beim diesem Flugmanöver werden nochmals die Unterschiede zu einer gewöhnlichen Drohne erkennbar, denn eine gewöhnliche Drohne kann sich ebenfalls leicht Neigen aber dies ist nicht möglich ohne sich von der Stelle zu bewegen. Sobald der Flugroboter die gewünschte Neigung erreicht hat, nähert sich der Roboter der Brückenuntersicht an. Nachdem der Kontakt erstellt ist, startet die Messung des Potentials und des elektrischen Widerstandes und der Flugroboter stellt sicher, dass der Kontakt zur Betonoberfläche erhalten bleibt. Mit diesem Flug wurde verdeutlicht, dass der Flugroboter seine Neigung kontrollieren kann und sich somit an seine Umgebung anpassen kann und auch ausserhalb der Laborumgebung ohne externes Kameraverfolgungsystem einsatzfähig ist.

Links: Neigen des Flugroboters.
Mitte: Anfliegen der Zielkoordinaten am Steg der Brücke.
Rechts: Halten des rechten Winkel gegenüber der Oberfläche während der Messprozedur.
Aufnahme des Potentialfeldes
Rund 3 Monate nachdem ersten Aussenflug im Oktober 2020 an der Brückenuntersicht wurde nochmals Flugversuche unternommen. Das Ziel war die Überarbeitungen und Integration eines leistungsfähigeren Messgerätes bei einem Ingenieurbauwerk zu überprüfen und ein Potentialfeld an der Untersicht möglichst autonom aufzuzeichnen. Der experimentelle Aufbau war vergleichbar zum ersten Aussenflug. Der Arm mit dem Sensor war bei diesen Flügen gegenüber der Plattform nicht mehr geneigt. Die Abbildung unten zeigt das Resultat des Aussenflugs auf dem 3D-Scan der Oberfläche mit den Zielkoordinaten des Sensors auf der Betonoberfläche, den abgeschätzten Kontaktpunkten des Sensors sowie dem Mittelwert des aufgezeichneten Potentials an der jeweiligen Stelle.

Die Potentialverläufe der einzelnen Messpunkte am Brückenbauwerk sind in der Abbildung unten dargestellt und verdeutlichen nochmals, dass der Flugroboter den Kontakt während dem Kontakt grösstenteils aufrecht erhalten kann. Die Zielkoordinaten war ein orthogonales Raster mit Abständen von 20 cm und die Reihenfolge ist mit aufsteigen Ziffern angezeigt. Die Abweichung der Zielkoordinaten vom Kontaktpunkt des Armes der Betonoberfläche betrug im Mittel ca. 7 cm bei einer Standardabweichung von 1 cm. In jedem Fall wurde die Kontaktpunkte relativ zum Standort der Totalstation verortet. Die Koordinaten der Totalstation in einem übergeordneten Koordinatensystem könnten ebenfalls bestimmt werden, dies ermöglicht bei weiteren Inspektion das übereinanderlegen der Messresultate mehrerer Inspektionsflüge für die Überwachung des zeitlichen Verlaufes von Potentialdaten. Die aufgebrachte Kraft war in jedem Fall ausreichend um stabile Potentialwerte zu erhalten.
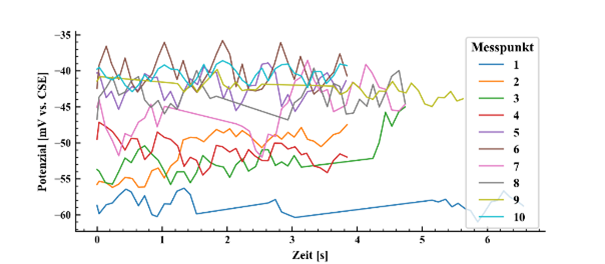
Die Mittelwerte der Potenziale gegenüber der Referenzelektrode befinden sich in typischen Bereichen für karbonatisierten Beton an leicht bewitterten Bauteilen wie am vorliegenden Objekt. Die mittlere Zeit für die Aufnahme der Inspektionsdaten an einem Punkt zur Erfassung der Potentiale und des elektrischen Widerstandes betrug im Mittel rund 10 s. Die benötigte Zeit zur Aufnahme für die Aufnahme eines Punktes betrug rund 25 s. Diese Zeit wird in Zukunft noch deutlich verringert werden, einersseits durch einerseits durch Optimierung bei der Kontrolle des Flugroboters dies beinhaltet u.a. die Reduzierung der Sicherheitsmarge bei der maximalen Fluggeschwindigkeit, der maximalen zulässigen Beschleunigung sowie einer Reduzierung der Distanz zur Oberfläche bei der Flugtrajektorie von Punkt zu Punkt. Andererseits kann die Zeitdauer für die Aufnahme des Potentials (aktuell 5 s) reduziert werden, als auch die Anzahl der Messungen des elektrischen Widerstandes beim Kontakt.
Laborflüge mit der Radelektrode
Die vorgestellte Radelektrode von G. Crotta während seiner Masterarbeit am ASL (Mechatronic Design of a Wheel Electrode Sensor for Robotic Inspection) entwickelt.
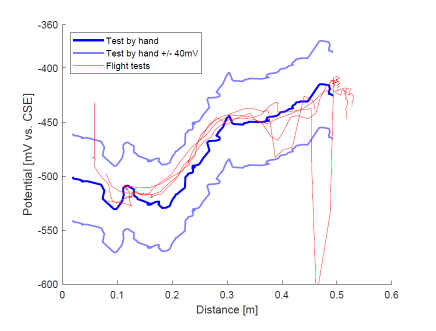
Die Radelektrode wurde bei Innenflügen ausführlich auf die Funktionstüchtigkeit getestet. Die Abbildung unten zeigt den Potenzialverlauf entlang eines Prüfkörpers von mehreren, aneinander gereihten Flügen im Vergleich zu einer Messung mit der Radelektrode aufgedrückt von Hand. Die zahlreichen Flügen waren möglich durch die Integration der Bodenstation für die Energieversorgung, somit kann auf dem Einsatz von Akkumulatoren verzichtet werden. Die Messwerte verdeutlichen, dass die Resultate des Flugroboters und die Handmessungen mit der entwickelten Radelektrode zu vergleichbaren Resultaten führen. Unterschiede lassen sich einerseits durch die zusätzliche Feuchte, aufgebracht durch die Befeuchtung der Räder, andererseits durch die leichte Abweichung der einzelnen Pfade in der vertikalen Richtung erklären. Der Aussreisser bei ca. 0.45 m lässt sich durch ein kurzzeitiges Abheben der Radelektrode belegen.
Das Video zeigt den Flugroboter mit der Radelektrode in Kontakt mit einem Betonprüfkörper. Die Wasserspuren zeigen den Kontakt der Räder mit der Betonoberfläche deutlich an als auch die Pfad parallel zur Kante des Prüfkörpers wie in den Zieltrajektorien des Fluges angegeben, sowie die aktive Benetzung der Oberfläche mit Trinkwasser.